PID vs. Other Control Methods: What's the Best Choice?

Almost everyone who has worked in automated systems and manufacturing industries will likely tell you that the gold plate standard for process control applications is PID Control. Most industrial control loops utilize some combination of PID control.
In this article, we’ll discuss PID control and we’ll also introduce you to two advanced techniques: Fuzzy Logic Control and Model Predictive Control (MPC).
There are other alternatives to PID control such as Adaptive Control and Neural Network Control. Those are topics for another time.
Let’s start with a discussion about a very basic process control technique called ON/OFF or Bang-Bang Control.
This technique is very common and found in applications such as home heating where a furnace is either ON or OFF. What we end up with is a continuous temperature fluctuation around the desired setpoint.
ON/OFF control may be okay for a house, but it is not okay for industrial processes or motion control as these fluctuations around the setpoint are not acceptable.
Next up on the list is a feedback control algorithm called PID control.
PID control
The 3 main components are Proportional, Integral, and Derivative.
PID control is very versatile and goes a long way to ensure that the actual process under control is held as closely as possible to the setpoint regardless of disturbances, or setpoint changes.
For example, PID control produces an acceptable quarter-wave response to a 1% setpoint change in a Tank Level process control system.
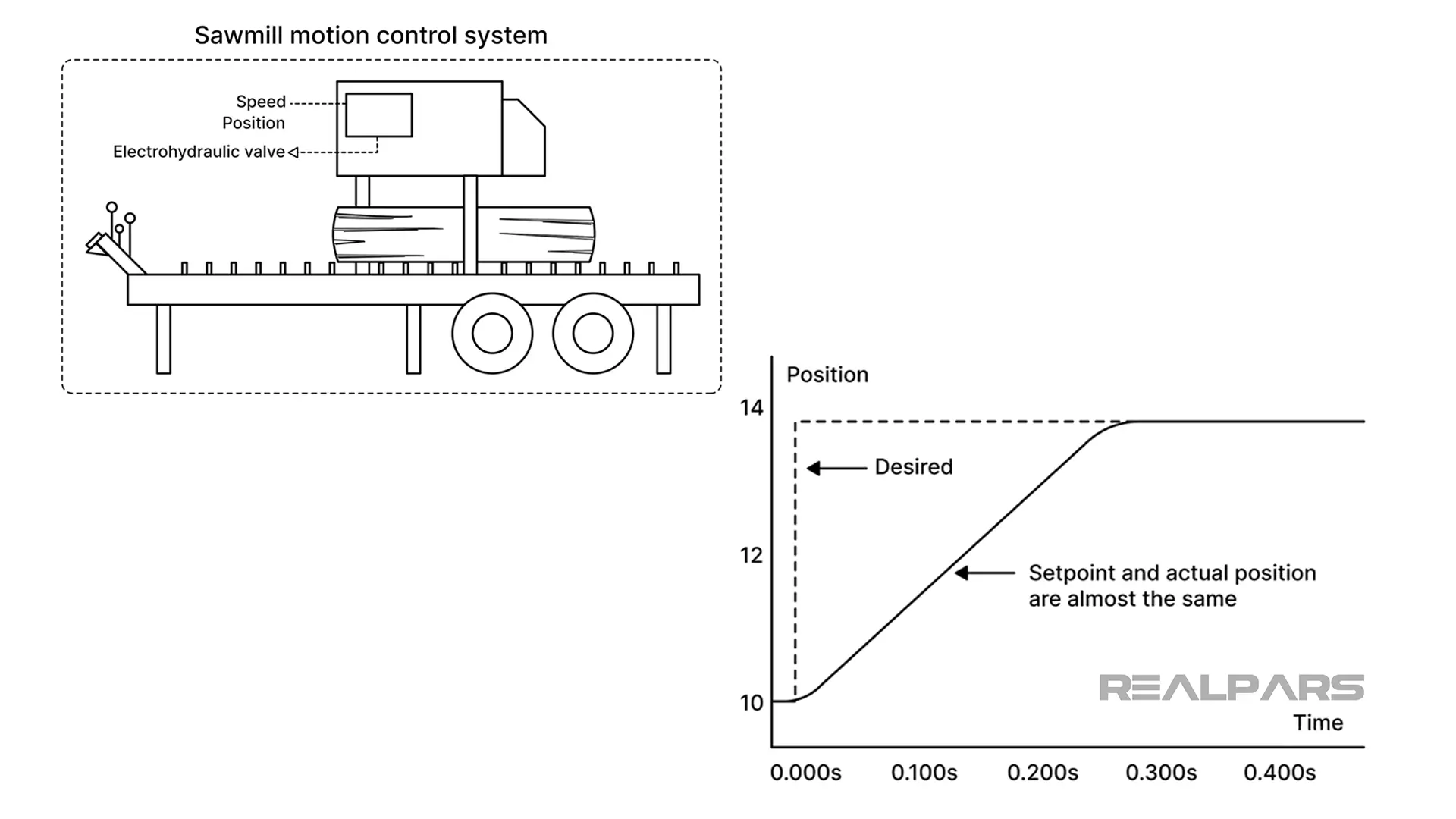
However, that quarter-wave type of response just won’t work in a sawmill motion control system where the speed and position of an electrohydraulic valve are critical.
The valve position cannot be allowed to swing wildly around the setpoint.
Controller tuning involves a procedure where each component of the PID algorithm is adjusted to produce the desired response to setpoint changes or disturbances.
Why is PID control so popular?
Well, PID control has been around for a very long time. PID control is taught to Engineers and technicians in every college and university. PLCs and DCSs have built-in PID functionality and many have auto-tune features. PID control is simple, versatile, and reliable.
But, it’s not always the best choice, and many applications are better suited to more advanced control techniques.
Components of PID control
Alright…let’s have a brief discussion on the components of PID control.

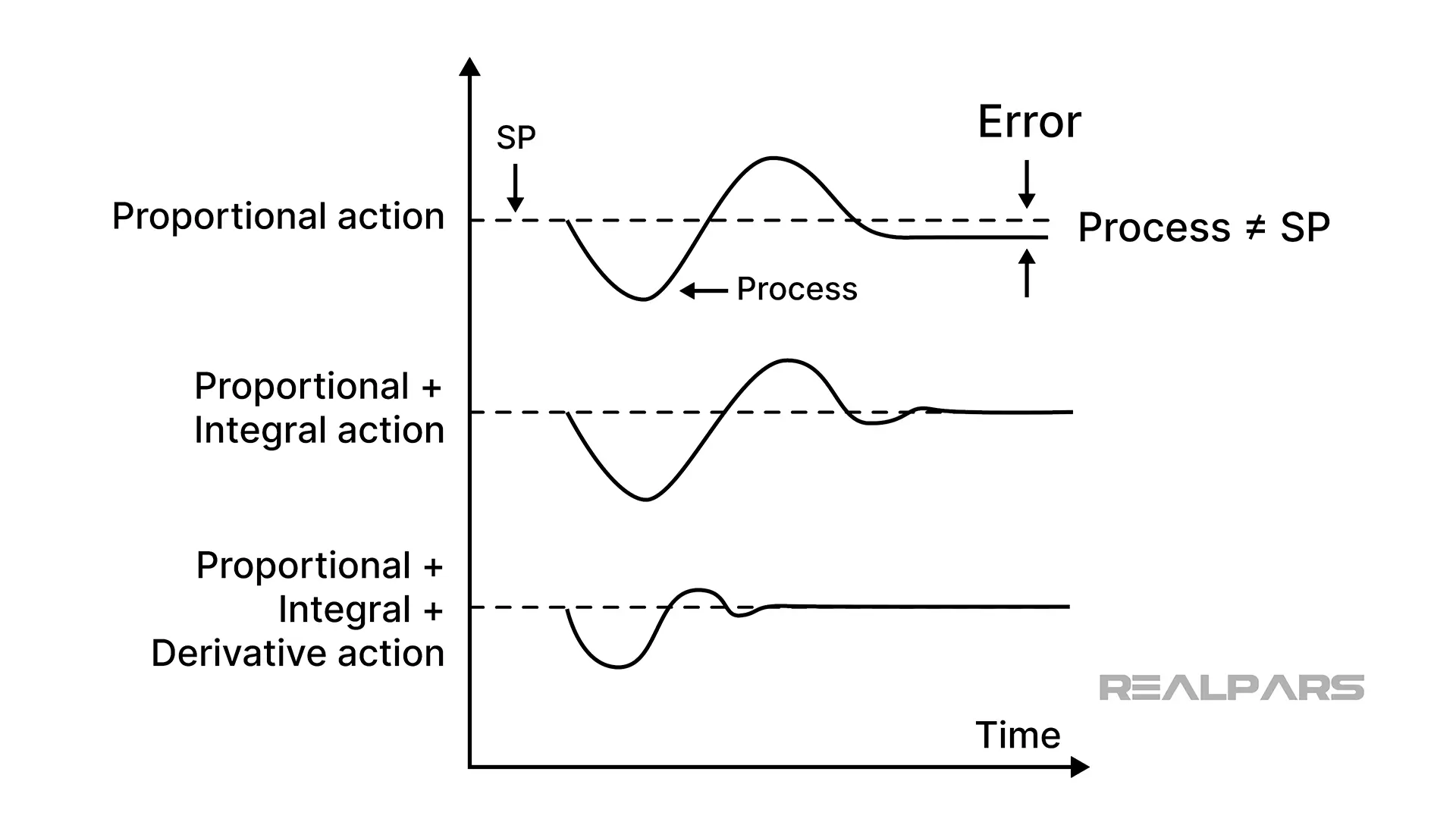
The Proportional component applies an effort in proportion to how far the process is away from the setpoint. Proportional control gets you close to the Setpoint, but not quite there.
The Integral component applies an effort to return the process to the setpoint after the Proportional control quits. The longer the error exists, and the greater the amount, the larger the integral output. The Integral component looks at the speed at which the process is moving away from the setpoint.
Derivative control looks ahead to see what the error will be in the future and adjusts the controller output accordingly.
Each component contributes a unique signal that is added together to create the controller output signal.
Alright…that’s enough said about PID Control.
We dive deeper into PID control in our course called PID Controller Basics. You can sign up for this course at realpars.com.
Let’s move on to advanced process control techniques.
Fuzzy Logic Control
We’ll start with Fuzzy Logic Control (FLC).
We’ve been taught that the binary or logic world has only 2 possibilities. For example, these 2 possibilities are 1 or a 0 when 1 is True and 0 is False.
Stretching the binary concept a bit further, we have lots of linguistic binary pairs such as Up or Down, ON or OFF, Hot or Cold… You get the picture…
Fuzzy Logic says that there may be more than 2 possibilities. For example, there might be a partially true in addition to True and False. Based on the fuzzy logic concept, we can have lots of values between Cold represented by 0, and Hot represented by 1!
Fuzzy set
Let’s look at a very basic example.
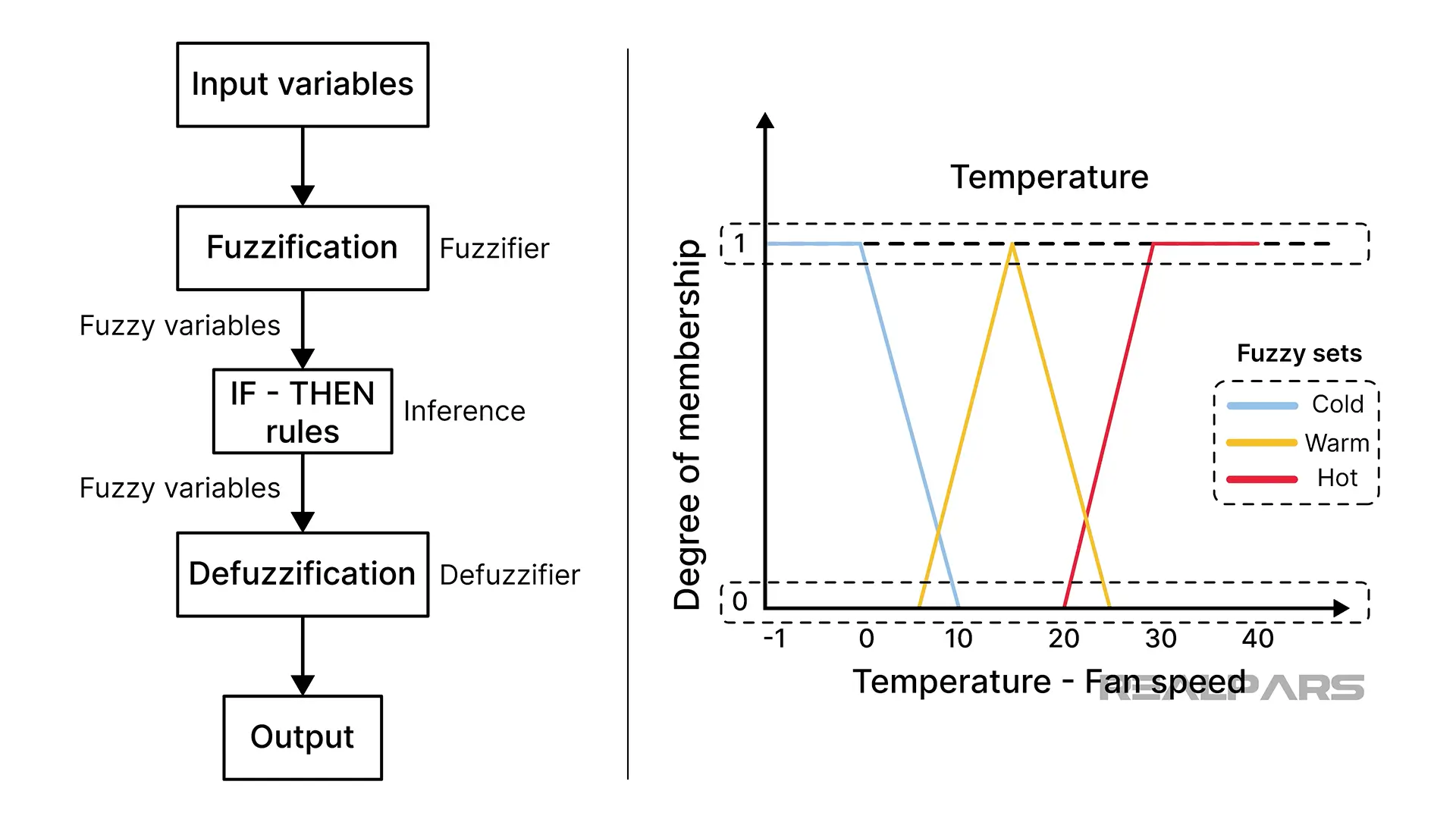
Fuzzification is the process of converting specific input values into some degree of membership of fuzzy sets based on how well they fit. Membership functions describe the degree of membership of a particular input or output variable to linguistic variables such as Temperature and Fan Speed.
These membership functions can be represented graphically where each fuzzy set has a degree of membership to a temperature range based on the room temperature.
What is a fuzzy set?
A fuzzy set relates to membership linguistic variables. For example, a linguistic variable Temperature might have fuzzy sets like hot, warm, and cold, each with its own membership function.
These membership functions help quantify the fuzzy logic involved in making decisions based on linguistic variables rather than precise numerical values.
FLC uses a set of IF-THEN rules that express how the input variables relate to the output variable. These rules are based on linguistic terms.
For example, a fuzzy rule might be: IF the temperature is Hot, THEN the Fan Speed is High.
Fuzzy inference assesses how well the input variables match the conditions specified in the fuzzy rules.
Finally, Defuzzification is the process of converting the fuzzy conclusions into a real-world output value.
Some vendors have combined PID and Fuzzy Logic. The Omega CN74000 series controllers are self-tuned PID Controllers with Fuzzy Logic features.
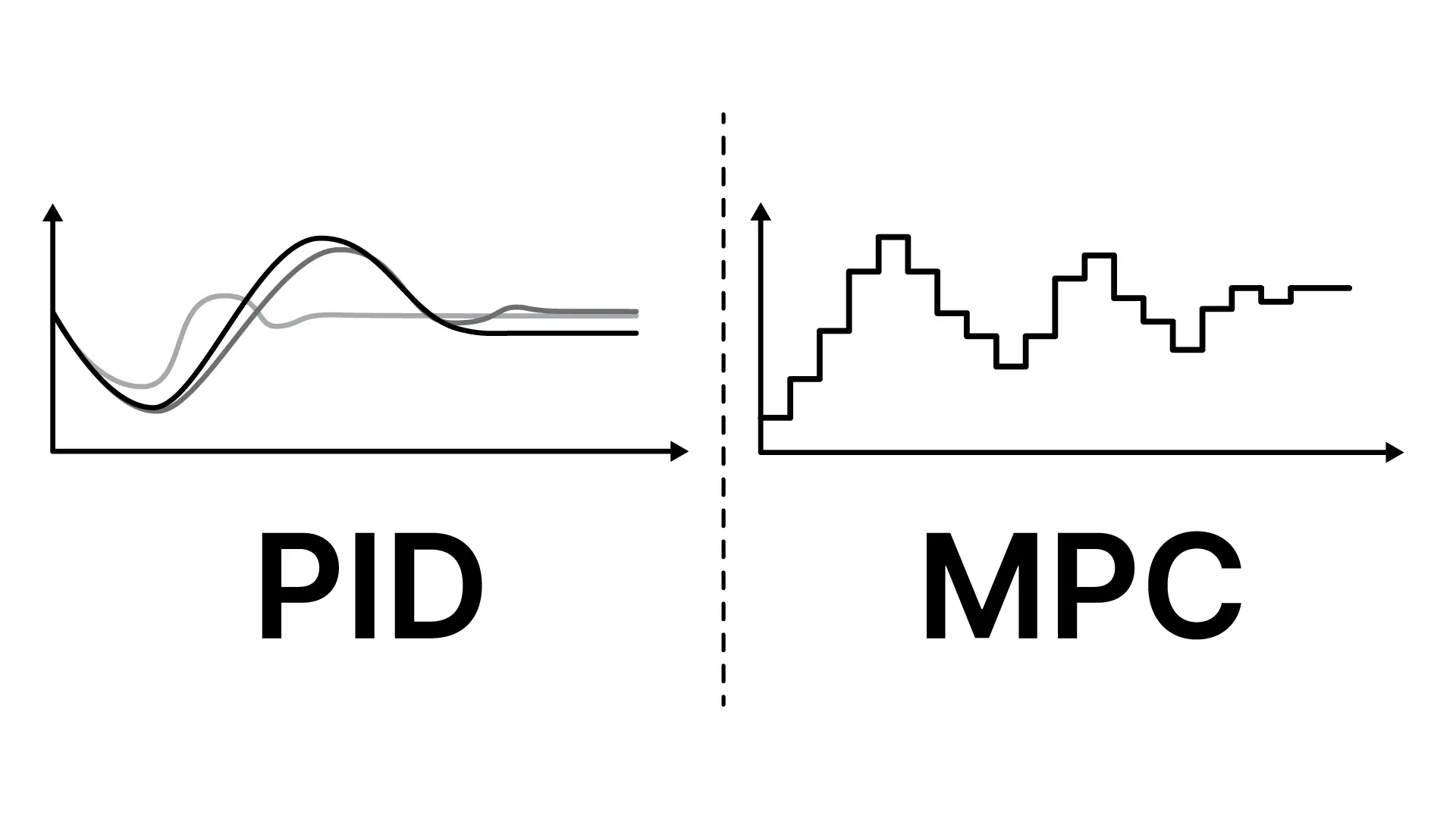
Next up for discussion is Model Predictive Control (MPC).
Model Predictive Control
Model Predictive Control (MPC) is a feedback control technique that uses a mathematical model to predict the behavior of the process variable.
In contrast to a PID controller that automatically adjusts the control output based on the input data, an MPC controller is a control algorithm that predicts the future behavior of a system based on a mathematical model. It utilizes this model to optimize and generate control actions.
The predictive nature of MPC makes it a powerful and widely used control strategy in many industrial applications.
Let’s look at a block diagram of MPC for a robotic system.
We’ll start with the MPC controller components.
The MPC Controller uses the robot model, kinematics, and dynamics to calculate the optimal control inputs over a predetermined, limited period. The output of the MPC controller is the calculated control input trajectory for the robot.
The Reference block represents the desired robot behavior including things like gripper positions, orientations, and motions to follow also referred to as Trajectories.
The Kinematics and dynamics block provides a mathematical description of how control inputs affect the robot's movements, including translations, rotations, and joint angles.
In a nutshell, robot kinematics is about the geometry of movement and position, and Dynamics is about the associated forces and torques.
The Optimization block represents the algorithm within the MPC controller.
Without going into a deep mathematical discussion, the optimization block plays a critical role in determining the best control actions to achieve desired system behavior while considering the robot’s state, operational constraints, and sequence objectives.
Finally, the Control Inputs Block represents the actual control inputs that are applied to the robot as determined by the optimization algorithm.

Summary
Each control method we’ve discussed in this article has its strengths and suitability for different types of systems and applications.
PID control is used in simple process applications where implementation and tuning are relatively easy.
FLC is suitable where human input or linguistic variables are involved, such as consumer appliances.
MPC works well in systems with multiple interacting variables, such as industrial processes, robotics, and autonomous vehicles.
As we said earlier, there are other alternatives to PID control such as Adaptive Control and Neural Network Control and we’ll leave those for another time.
If you want to learn more about PID control concepts in-depth, be sure to explore our PID Controller Basics course.

Learn from Industry Experts
With a 7-day trial, then €25/month