What is the Difference between Absolute and Incremental Encoders?


In a previous lesson, we discussed what an Encoder is and how it can be implemented in your application. In this article, we are going to discuss the difference between Absolute and Incremental encoders and which one may be used for which function.
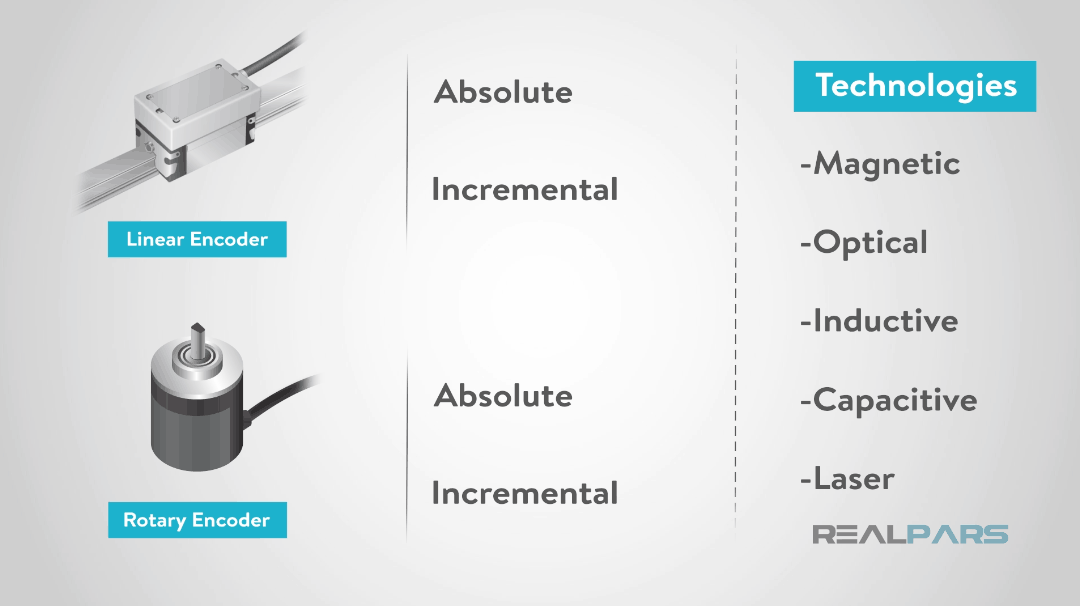
Encoder Types and Technologies
There are many different types of encoders but they basically fall into two main sensing techniques. Those being:
– Linear
– Rotary
Within those categories, there are differing encoder measurement types such as:
– Absolute
– Incremental
There are also various electromechanical technologies such as:
– Magnetic
– Optical
– Inductive
– Capacitive
– Laser
There is a plethora of information regarding Encoders and it may seem hard to wrap your head around.
Descriptions like rotary or linear, optical and magnetic, absolute and incremental.
We touch on a few basics to help you understand what’s what and why.
Let’s first break these categories down a little and explain a couple of the many configurations.
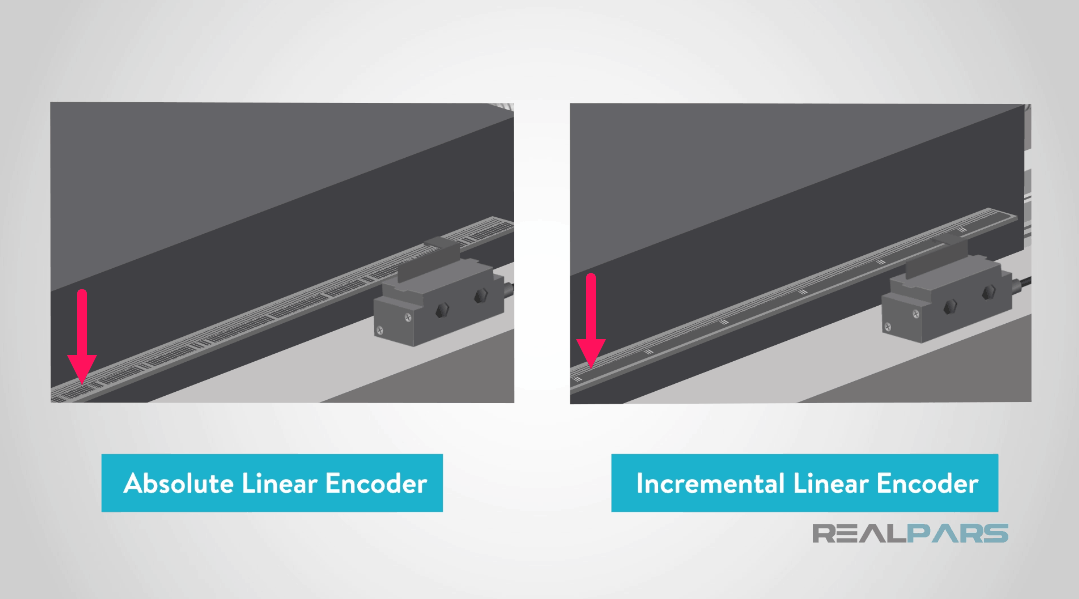
1. Linear Encoder
First, the Linear Encoder uses a transducer to measure the distance between two points. These encoders can use a rod or a cable that is run between the encoder transducer and the object that will be measured for movement.
As the object moves, the transducer’s data collected from the rod or cable creates an output signal that is linear to the object’s movement.
As the distance is measured, the Linear Encoder uses this information to determine the position of the object.

An example of where a Linear Encoder may be used is for a CNC milling machine where precise movement measurements are required for accuracy in manufacturing.
Linear Encoders can be “Absolute” or “Incremental”. We will touch on Absolute and Incremental measurements a little later in this article.
2. Rotary (Shaft) Encoder
A Rotary Encoder collects data and provides feedback based on the rotation of an object or in other words, a rotating device.
Rotary Encoders are sometimes called “Shaft Encoders”. This encoder type can convert an object’s angular position or motion based on the rotation of the shaft, depending on the measurement type used.
“Absolute Rotary Encoders” can measure “angular” positions while “Incremental Rotary Encoders” can measure things such as distance, speed, and position.
Rotary Encoders are employed in a wide variety of application areas such as computer input devices like mice and trackballs as well as robotics.
Rotary or Shaft encoders, as previously stated, may be “Absolute” or “Incremental”.

3. Position Encoder
The next encoder, which is a “Position” Encoder, is used to determine the mechanical position of an object. This mechanical position is an “absolute position”.
They may also be used to determine a change in position between the encoder and object as well. The change in position in relation to the object and encoder would be an incremental change.
Position Encoders are widely used in the industrial arena for sensing the position of tooling and multi-axis positioning.
The Position Encoder can also be Absolute or Incremental.
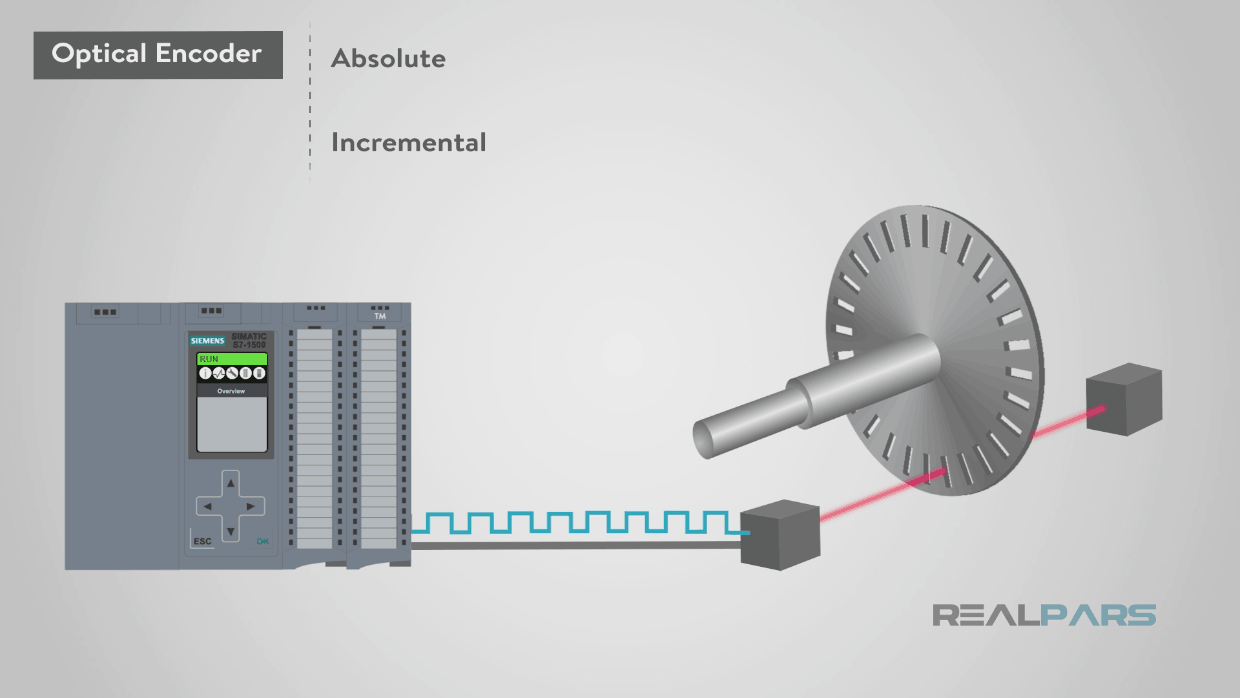
4. Optical Encoder
“Optical” Encoders interpret data in pulses of light which can then be used to determine such things as position, direction, and velocity.
The shaft rotates a disc with opaque segments that represent a particular pattern. These encoders can determine the movement of an object for “rotary” or “shaft” applications while determining exact position in “linear” functions.
Optical encoders are used in various applications such as printers, CNC milling machines, and robotics.
Again, these encoders may be Absolute or Incremental.
After explaining the main groups, you may be seeing a pattern.
All the encoders basically do the same thing, produce an electrical signal which can then be translated to position, speed, angle, etc.
Absolute Encoder vs. Incremental Encoder
Now that we have broken down the main groups, let’s discuss the difference between Absolute and Incremental measurements.
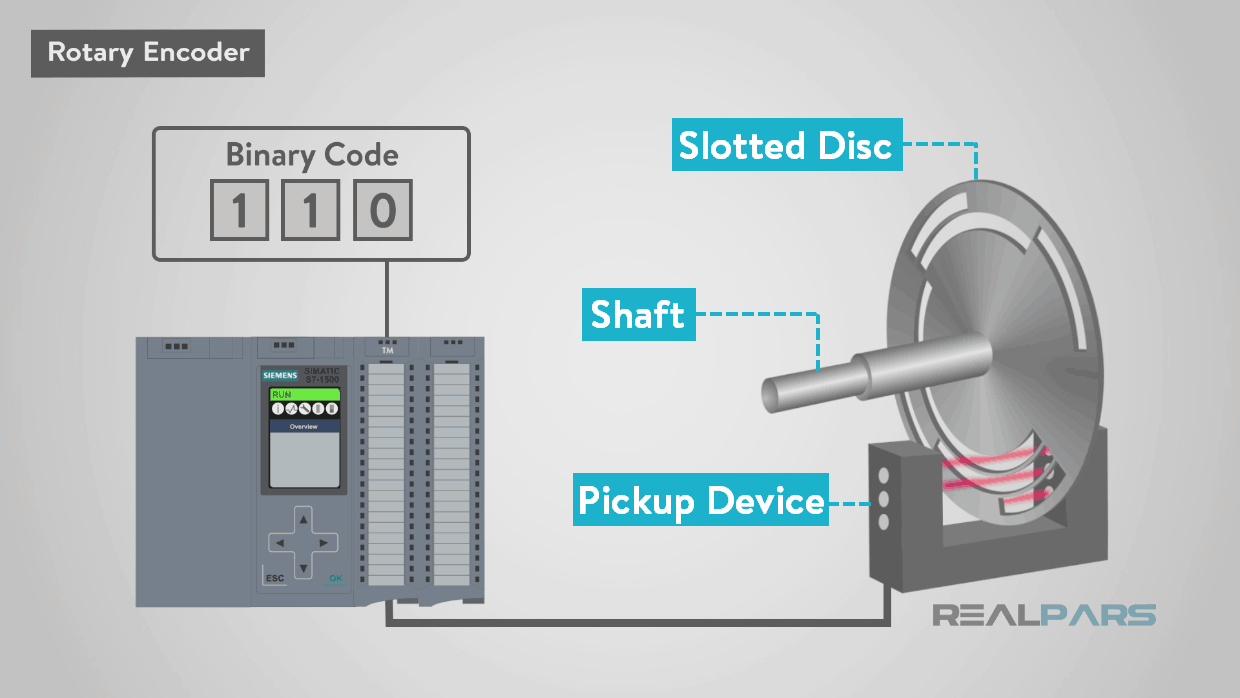
To discuss the difference between absolute and incremental measurements, we will use the Rotary Encoder type as an example.
In a Rotary “Absolute” measurement type encoder, a slotted disc on a shaft is used in conjunction with a stationary pickup device. When the shaft rotates, a unique code pattern is produced. This means that each position of the shaft has a pattern and this pattern is used to determine the exact position.
If the power to the encoder was lost and the shaft was rotated, when power is resumed, the encoder will record the absolute position as demonstrated by the unique pattern transmitted by the disc and received by the pickup.
This type of measurement is preferred in applications requiring a great degree of certainty such as when safety is a primary concern. Because the encoder knows, at all times, its definitive position based on the unique pattern produced.
Absolute measurement encoders can be
– Single-turn
or
– Multi-turn
“Single-turn” encoders are used for measurements of short distance while “multi-turn” would be more suitable for longer distances and more complex positioning requirements.

For incremental measure encoders, the output signal is created each time that the shaft rotates a measured amount. That output signal is then interpreted based on the number of signals per revolution.
The incremental encoder begins its count at zero when powered on. Unlike absolute encoders, there are no safeguards regarding the position.
Because the incremental encoder begins its count at zero in startup or power disruption, it is necessary to determine a reference point for all tasks requiring positioning.
Encoders in Counting Applications
In the previous article, when describing the use of an encoder for the purpose of counts, that example is a good example of an incremental encoder.
Assume that the power has not been disrupted and you have turned on the conveyor, and placed the machine in setup mode.
As the encoder is turning, the controller is receiving counts. Let’s say the count range is 0 to 10000.
This is an incremental encoder so the absolute position is not known, we just know that a full revolution of the shaft registers a count of 10000.
We’ll place the object on the conveyor and, as soon as the entrance photo-eye sensor detects the object, the current encoder count is captured. Let’s say that number is 5232.
We will then capture the count with the object exiting and being detected by the exit photo-eye. We’ll say that the number is 6311. So to determine the count of the full travel, we will subtract 5232 from 6311 and determine that the object travel is 1079 counts.
By this example, it is obvious that we do not know the absolute location of the object, we just know that the travel count from the entrance to exit is 1079.
That doesn’t tell us that the object is three inches from the exit, just entering, etc.
we just know that the object will enter, a count will be captured, and the object will exit and again, the count captured.
In the event that we did not see the object exiting within the allowable travel count, plus or minus a deadband, the machine will fault and the process will stop.

There are many, many encoder variations out there and we could go on for hours about the varying types.
Hopefully, we have given you a basic understanding of what’s out there and when you may want to choose one particular type over the other.
Got a friend, client, or colleague who could use some of this information? Please share this article.
The RealPars Team

Learn from
Industry Experts
With a 7-day trial, then €25/month