

What is EtherCAT? EtherCAT is Ethernet for Control Automation Technology. It is a technology based on Ethernet and was developed specifically with industrial automation in mind.
EtherCAT use standard frames as well as the physical layer as characterized in IEEE 802.3 Ethernet Standard however it addresses some specific concerns for industrial automation such as:
– Rapid response times
– Minimal data requirements for each device
– Low Costs of implementation
Difference between Ethernet vs EtherCAT
Ethernet is not a practical solution for many industrial applications as it routes frames of data to and from a vast number of separate addresses, individually, where the data may be something as simple as a single register to obtain a real-time analog reading.
This node-specific routing requires massive bandwidth as the data packets are only moved when the Master or Client requests the data. That’s why it helps to compare EtherCAT vs Ethernet.
EtherCAT, in contrast, uses the same physical and data link layers as Ethernet but the protocols deviate from there.
Ethernet, as stated previously, is able to route data through many different nodes, in a master/slave configuration, sending and receiving based on requests.
With EtherCAT, the master sends data, possibly only a single frame for the entire node network that will pass through each node.
The master is the boss and is the only node allowed to send a frame. The frame is then forwarded, downstream, by each node in the network. This approach helps to assure real-time operation and avoids delays.
EtherCAT Devices Data Processing on the Fly
Each EtherCAT device processes the data frame that is relevant to it in its hardware/software, on the fly, and adds its data to the data frame as it is passing through the network.
EtherCAT networks do not require external switches in the network.
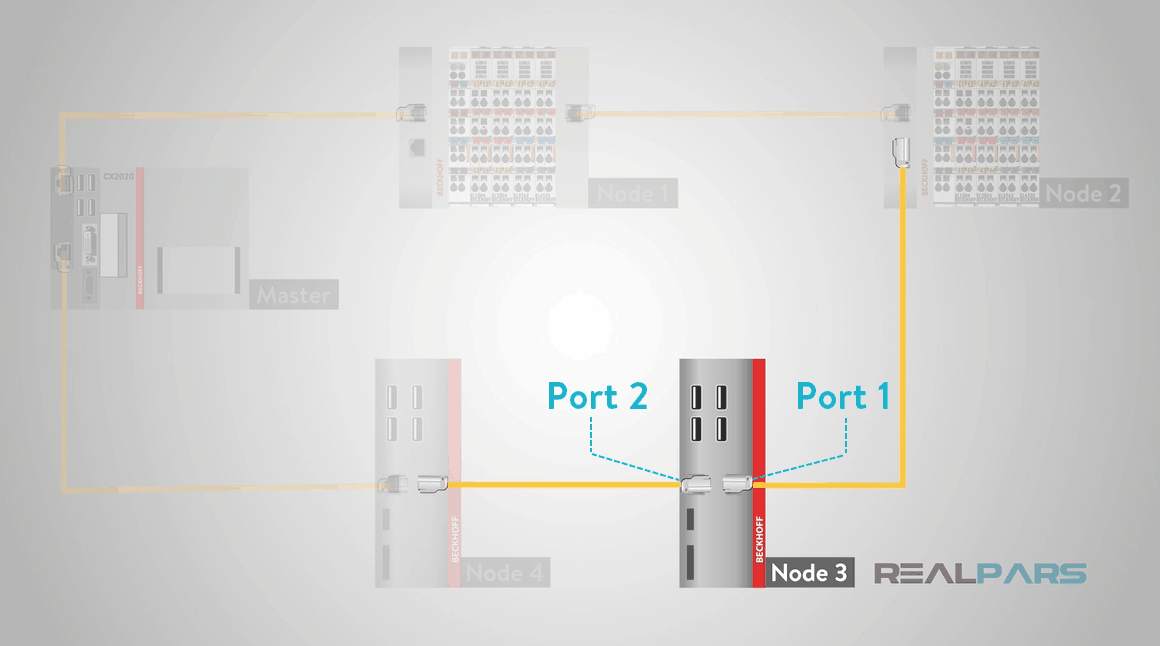
Each EtherCAT device typically has two Ethernet ports, the first port being the receiving port or previous node’s cable and the second port connected to the next node in the network.
The processing of the data, on the fly in the hardware of the device, is a major advantage of EtherCAT.
EtherCAT Compatible Speed
Although there is still a small delay in the data frame as the device adds its data to it, it is greatly reduced by the often single data stream of EtherCAT versus the multiple Ethernet frames used in an Ethernet network. This advantage can also be a disadvantage.
Many devices may not be able to handle these highly decreased cycle times and EtherCAT network may need to be slowed to accommodate these devices.
Since the EtherCAT network can be slowed, mark the disadvantage as an advantage once again.
EtherCAT Distributed Clock System
EtherCAT also utilizes a distributed clock system. This method allows for low jitter without additional hardware and it meets with the synchronization importance desired in industrial automation.
As the EtherCAT frame passes through each node, the node adds a “received message” timestamp to its data.
Each node adds the timestamp as the message is received and then, each node again attaches a timestamp as the frame moves back through the nodes, on the way back to the master.
The master then has an accurate delay for each node as timestamp data is calculated with every data frame transmission.
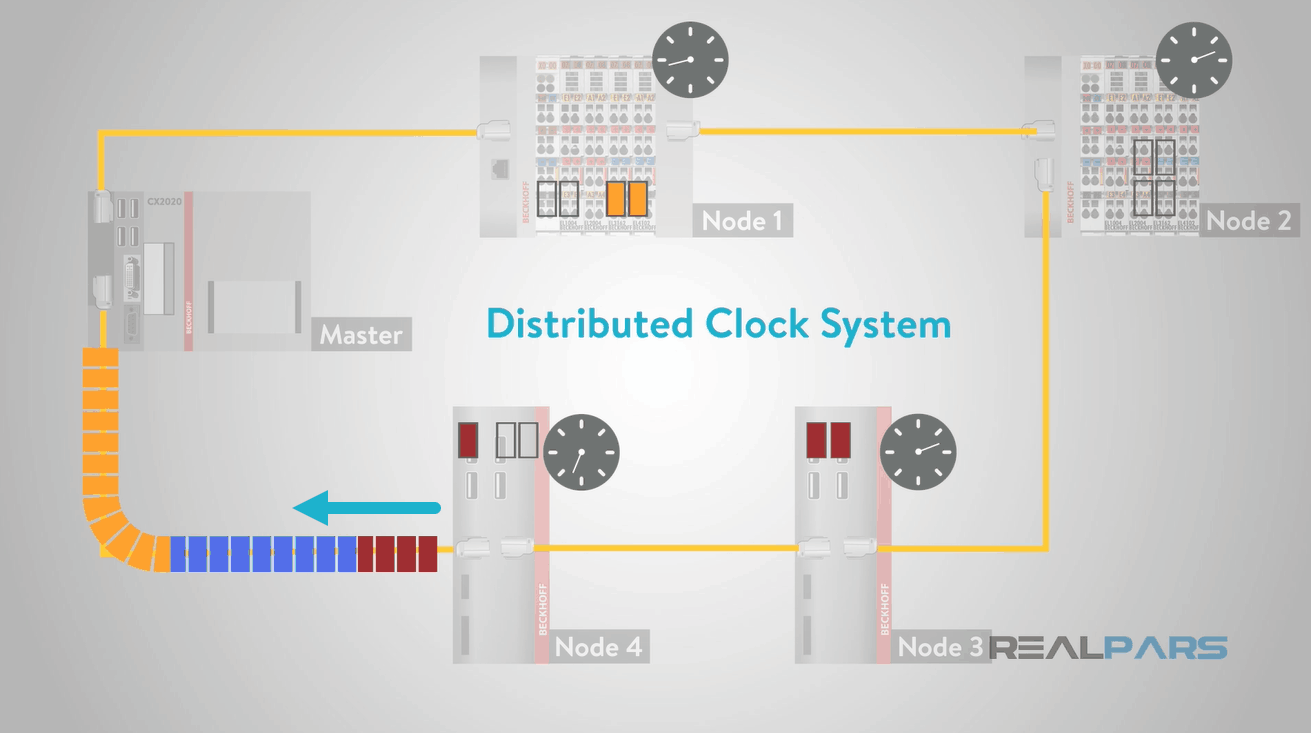
With EtherCAT’s intrinsic ring topology, discussed later, this ensures increasingly accurate data with every data transmission because of the distributed clock mechanism. This is one of the advantages of EtherCAT.
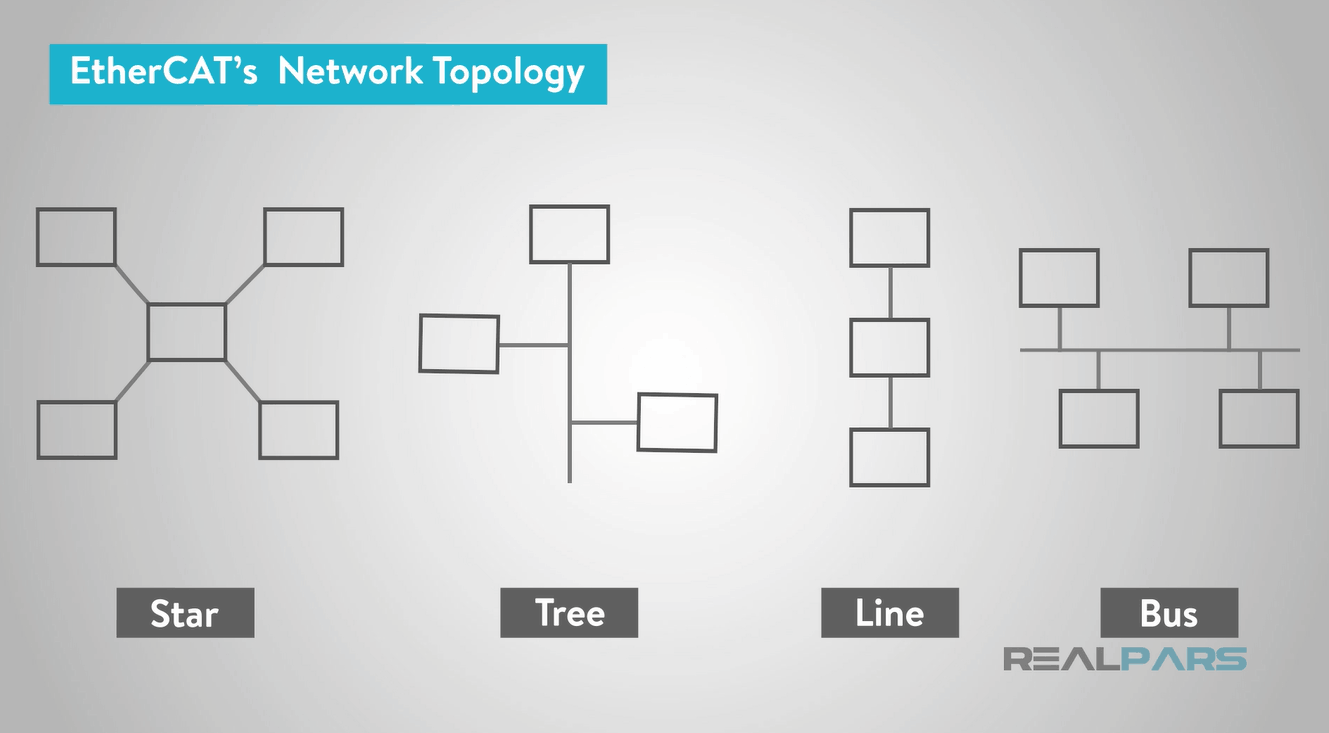
EtherCAT Network Topologies
Another advantage of EtherCAT comes in the form of network topology.
Many of the different network topologies may be used within an EtherCAT network. Because it utilizes Ethernets full duplex layers, the EtherCAT slave will automatically return the frame, to the master, with an open port detected downstream, essentially, self-terminating.
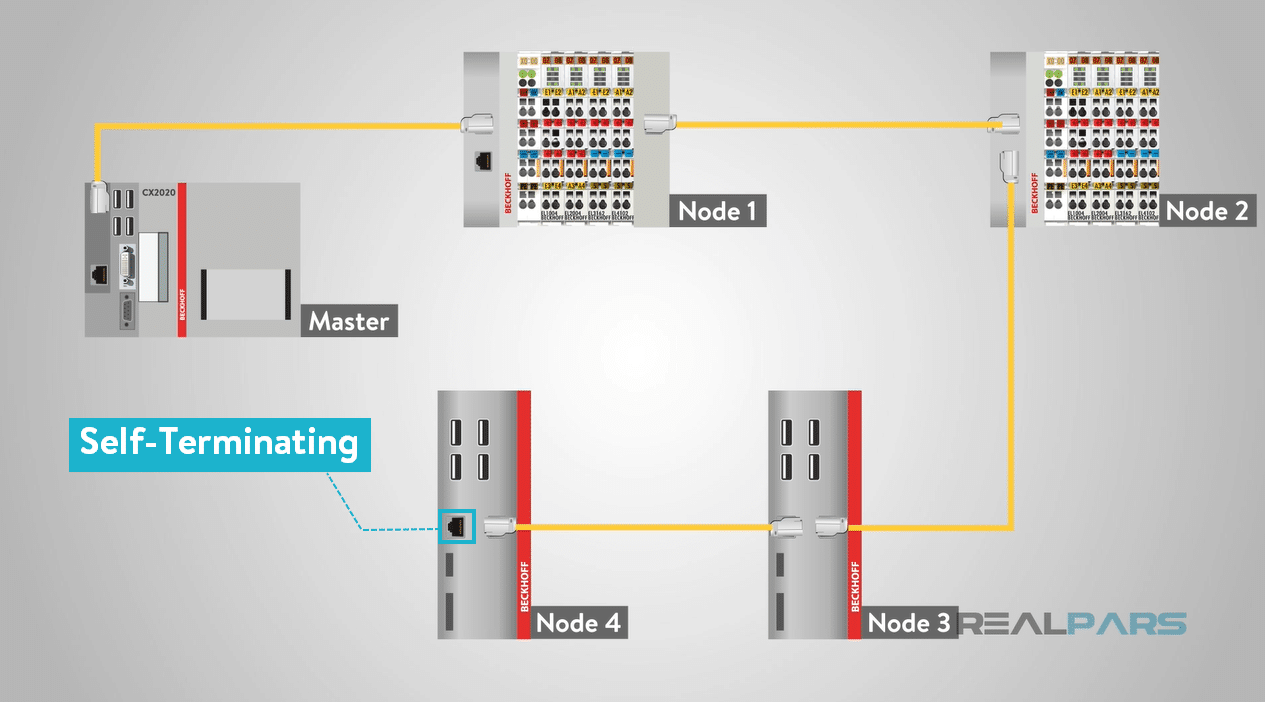
Ethernet’s star topology is simple and can be used but EtherCAT networks can extend well beyond that with a tree, line, etc.
It can also be used in a Fieldbus type system using Ethernet hardware, giving incredible flexibility for your EtherCAT network.
EtherCAT Redundancy Using Ring Topology
Considering the inherent “ring technology” of EtherCAT, connecting the network in a ring topology would be a “redundant system” if you can imagine. Because it’s inherently a ring topology, connecting the master’s second port, if available, would provide redundancy on the other side of the network break.
Each topology type should be investigated for your network to conclude which solution would be best for your application.
EtherCAT Advantages Over Ethernet
In conclusion, EtherCAT is Ethernet with some really nice bells and whistles.
Designed with the industrial arena in mind, EtherCAT has great advantages over the standard Ethernet network. Those include:
– Drastically increased speed
– Reduced data traffic
– Decreased hardware cost for implementation
– More and more accurate data due to the distributed clock mechanism
EtherCAT is the cat’s meow, puns intended! It’s increasing in popularity among controls engineers desiring a real-time and robust high-speed network for industrial controls.
What new insights did you glean from this article on EtherCAT? Let us know in the comments below!
The RealPars Team